4.3 Ondes de compression et relation de saut
Fondamental :
On suppose maintenant que \(\rho_g < \rho_d\) : la circulation devient donc de moins en moins fluide. La fonction \(C_0(x) = C[\rho_0(x)]\) est alors strictement décroissante. Pour les temps courts, le calcul de la solution \(\rho(x,t)\) s'effectue comme précédemment en traçant les caractéristiques. Mais ces droites se coupent (figure "onde de choc"). Leur enveloppe décrit deux courbes entre lesquelles est comprise la trajectoire d'un choc.
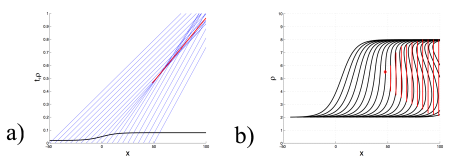
Formation d'un choc avec \({\rho_g\over \rho_{\rm max} }=0.4\) et \({\rho_d\over \rho_{\rm max}} =0.75.\)
a) Condition initiale est droites caractéristiques. b) Solution \(\rho(x,t)\) à des instants successifs.
Méthode :
Pour calculer la vitesse de ce choc, il faut considérer l'équation de bilan global
\[\frac{d \, }{dt} \int_{x_1}^{x_2} \rho \; dx + \left[ Q(\rho) \right]_{x_1}^{x_2} = 0 \;,\] (1) |
qui s'applique à des fonctions \(\rho(x,t)\) admettant une discontinuité en un point mobile \(x_c(t)\) animé d'une vitesse \(w = \dot x_c.\)
Fondamental :
On note alors \(\left[ \mkern -2mu \left[ \smash{\rho}\right] \mkern -2mu \right]= \rho_D - \rho_G\) le saut entre les valeurs situées à droite \(\rho_D(t)\) et à gauche \(\rho_G(t)\) du choc. On montre alors que la solution discontinue \(\rho(x,t)\) vérifie la relation de saut
\[- w \left[ \mkern -2mu \left[ \smash{\rho} \right] \mkern -2mu \right] + \left[ \mkern -2mu \left[ \smash{Q(\rho)} \right] \mkern -2mu \right] = 0 \;. \] |
Complément :
En effet, la formule de Leibnitz permet d'écrire
\[\begin{eqnarray} \frac{d \, }{dt} \int_{x_1}^{x_2} \rho\; dx & =& \frac{d \, }{dt} \left[ \int_{x_1}^{x_c^-(t)} \rho\; dx + \int_{x_c^+(t)}^{x_2} \rho\; dx \right] \cr &=& \int_{x_1}^{x_c^-(t)} \partial_t\rho\; dx +\int_{x_c^+(t)}^{x_2} \partial_t \rho\; dx + \dot x_c(t) \, \rho_G(t) - \dot x_c(t) \, \rho_D(t) \cr &=& \int_{x_1}^{x_c^-(t)} \partial_t\rho\; dx +\int_{x_c^+(t)}^{x_2} \partial_t \rho\; dx - w \; \left[ \mkern -2mu \left[ \smash{\rho} \right] \mkern -2mu \right] \nonumber\;. \end{eqnarray} \](2) |
D'autre part, on peut écrire
\[\begin{eqnarray} [Q]_{x_1}^{x_2} &=& Q[\rho(x_2,t)] - Q[\rho(x_1,t)] \cr &=& \left[ Q \right]_{x_1}^{x_c^-}+ \left[ Q \right]_{x_c^+}^{x_2} - Q[\rho_G(t)] + Q[\rho_D(t)] \cr &=& \left[ Q \right]_{x_1}^{x_c^-} + \left[ Q \right]_{x_c^+}^{x_2} + \left[ \mkern -2mu \left[ \smash{Q}\right] \mkern -2mu \right] \nonumber \;. \end{eqnarray} \](3) |
En sommant les équations (2) et (3) et en appliquant le bilan global (1) sur les intervalles \([x_1,x_c[\) et \(]x_c, x_2]\), on trouve bien que la vitesse du choc est
\[w = {\left[ \mkern -3mu \left[ \smash{Q(\rho)}\vphantom{A\over Q} \right] \mkern -3mu \right] / \left[ \mkern -3mu \left[ \smash{\rho}\vphantom{A\over Q} \right] \mkern -3mu \right]} \; , \] |
les valeurs de part et d'autre du choc étant connues grâce aux caractéristiques.
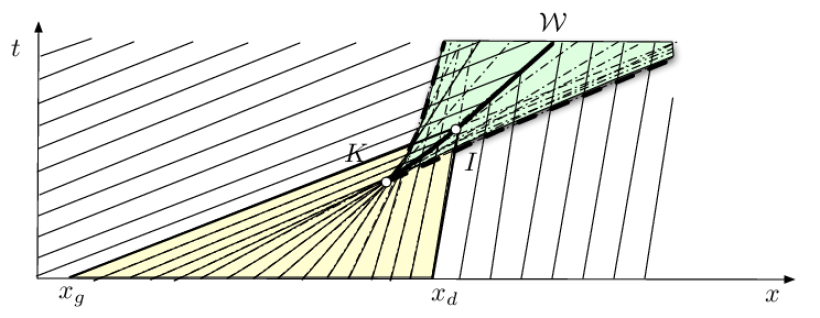
Trajectoire \({\cal W}\) d'équation \(x=x_c(t)\) du choc. Naissance du choc en \(K\) de coordonnées \((x_K, t_K).\) A partir du point \(I\) de coordonnées \((x_I, t_I),\) la vitesse du \(w=\dot x_c(t)\) est constante.
Exemple :
Pour l'exemple particulier considéré, on note \(K\) le point \((x_K, t_K)\) à partir duquel le choc prend naissance, et \(x=x_c(t)\) pour \(t\ge t_K\) l'équation de sa trajectoire \({\cal W}.\) Dans la mesure où \(\rho_0(x)=\rho_g\) pour \(x\le x_g\) et \(\rho_0(x) =\rho_d\) pour \(x\ge x_d\) sont constants à l'extérieur de l'intervalle \([x_g, x_d]\) on voit qu'à partir du point \(I\) situé à l'intersection des droites \(x=x_g+c(\rho_g) t\) et \(x=x_d+c(\rho_d) t\) ce qui définit ses coordonnées \((x_I,t_I),\) le choc est animé d'une vitesse constante
\[\displaystyle w = {Q(\rho_D) - Q(\rho_G) \over \rho_D - \rho_G} = {Q(\rho_d) - Q(\rho_g) \over \rho_d - \rho_g} \;. \] |
En effet, après le temps \(t_I,\) les points \((x,t)\) de la trajectoire \({\cal W}\) du choc sont à l'intersection d'une caractéristique \(x = a_g + C(\rho_g)\, t\) avec \(a_g < x_d\) provenant de la région uniforme de gauche et d'une caractéristique \(x = a_d + C(\rho_d)\, t\) avec \(x_d < a_d\) provenant de la région uniforme de droite. On a donc \((\rho_G, \rho_D)= (\rho_g, \rho_d).\)
La forme de la trajectoire du choc \({\cal W}\) entre les points \(K\) et \(I\) dépend de la forme de la fonction \(\rho_0(x)\) dans l'intervalle \([x_g, x_d]\).
Exemple :
Lorsque \(x_g = x_d = 0\), on voit que \(x_I=0\) et \(t_I=0.\) On est alors en présence d'un "choc centré'' animé de la vitesse constante \(w = {Q(\rho_d) - Q(\rho_g) \over\rho_d - \rho_g}.\)
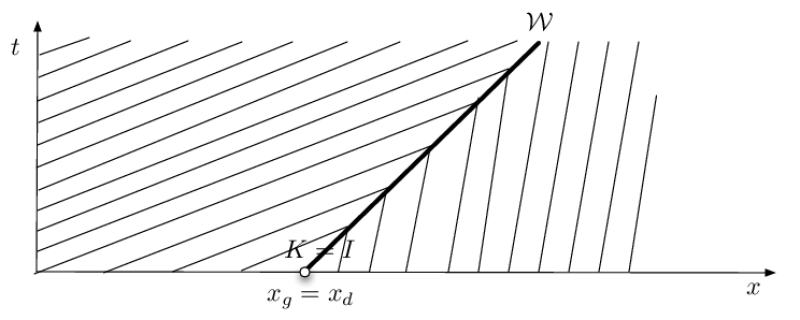
Cas du choc centré : \(x_g=x_I=x_K=x_d.\) La trajectoire \({\cal W}\) du choc est la droite d'équation \(x=x_c(t) =x_K+ w \; t.\)