3.3 Cas particulier c=c(ρ) et f=0
Fondamental :
Dans le cas où \(c(\rho,x,t)=c(\rho)\) ne dépend ni du temps ni de l'espace mais seulement de la variable \(\rho\) et dans le cas très particulier où \(f=0,\) l'équation d'advection s'écrit
\[\frac{\partial \, \rho}{\partial t} + c(\rho) \; \frac{\partial \rho}{\partial x} = 0 \;, \] |
avec la condition initiale \(\rho(x,0) = \rho_0(x)\) et le système dynamique s'écrit
\[\left\{ \begin{matrix} \dot x & = & c(\rho) \cr \dot \rho & = &0 \end{matrix} \right. \;,\] |
avec les conditions initiales \([x(0), \rho(0)]=[a, \rho_0(a)].\)
Le long des courbes caractéristiques \({\cal C}_a\) d'équations \(x=x(t)\) avec \(x(t)\) solution du système pour \(x(0)=a,\) la quantité \(\rho\) est constante (invariant de Riemann) et égale à \(\rho_0(a).\) On en déduit alors que ces caractéristiques sont des droites d'équation
\[x(t) = X(a,t) = a + c[\rho_0(a)] \; t \;. \] |
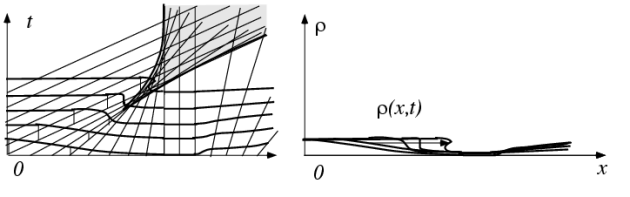
Les intervalles en \(a\) pour lesquels la fonction \(c[\rho_0(a)]\) croît avec \(a\) génèrent des droites caractéristiques qui ne se coupent pas pour \(t>0.\) En revanche, ces caractéristiques se coupent si cette fonction est décroissante. Le mouvement 1D inverse \(A(x,t)\) s'obtient en résolvant l'équation implicite
\[x = A(x,t) + c\left\{ \rho_0 \left[ A(x,t)\right] \right\} \;.\] |
Exemple :
Dans la région du plan \((x,t)\) où les droites caractéristiques ne se coupent pas, cette équation implicite admet une solution unique. La solution de l'équation d'advection s'écrit alors \(\rho(x,t) = \rho_0[A(x,t)].\)
Exemple :
Dans la région du plan \((x,t)\) où les droites caractéristiques se coupent, l'équation implicite conduit à plusieurs valeurs de \(a\) pour une couple \((x,t)\) donné. Il n'est donc pas possible de définir une solution \(\rho(x,t)\) monovaluée, sauf à ne considérer qu'une partie des caractéristiques. Ce choix ne peut se faire qu'en décrivant l'évolution d'un choc (discontinuité de \(\rho\)) dont la dynamique doit être décrite par une relation de saut venant compléter la modélisation continue de l'équation d'advection. De part et d'autre de la trajectoire \(x=X_c(t)\) du choc, on peut alors considérer que
la solution \(A(x,t)\) est celle qui correspond aux caractéristiques reliant \((x,t)\) à \((a,0)\) sans couper cette trajectoire.