Ondes sonores dans un tube
On considère un tube de section constante \(S\) rempli d'un gaz compressible dont la pression au repos est \(p_0\), la masse linéique \(\rho_0\) (kg.s\(^{-1}\)) et l'entropie \(s_0\). On s'intéresse aux petites fluctuations de pression, de masse linéique et de vitesse autour de cet équilibre. On suppose que ces grandeurs sont homogènes dans chaque section et on note \(p(x,t)\), \(\rho(x,t)\) et \(u(x,t)\) les champs de pression, de masse linéique et de vitesse longitudinale.
Définition : Linéarisation de la loi d'état
On suppose que l'entropie reste constante lors de ces fluctuations et que la loi d'état pour la pression s'écrit \(p= {\cal P}(\rho, s)\). En supposant que les fluctuations sont petites, on peut écrire :
Le coefficient de compressibilité \(1/c^2\) est forcément positif dans la mesure où la pression augmente lorsque le volume diminue.
Méthode : Modélisation discrète du mouvement
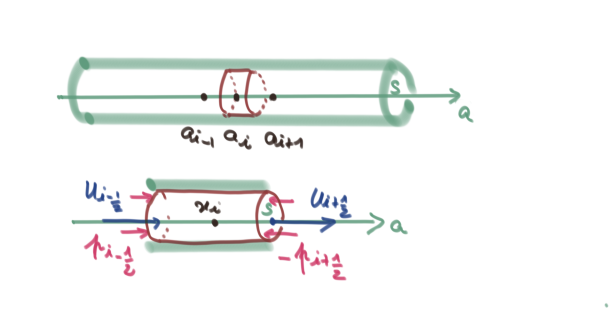
On découpe le volume de gaz contenu dans le tube en petits tronçons de tailles \(\delta a\) et de centres \(a_i\) pour \(i\in \mathbb Z\) et on note \(\rho_i\) la masse linéique de chaque tronçon. On note alors \(u_{i+{1\over 2}}\) et \(p_{i+{1\over 2}}\) la vitesse et la pression à l'interface des tronçons de centres \(a_i\) et \(a_{i+1}\).
Rappel : Conservation de la masse
Lors des petites fluctuations, le volume de gaz initialement contenu dans un tronçon varie sans perte de masse, ce qui induit des variations de la masse linéique. On note \(\zeta_i(t) = \delta a + d\zeta_i(t)\) la longueur variable du tronçon de position \(a_i\) et \(\rho_i(t) = \rho_0 + d\rho_i(t)\) sa masse linéique. La conservation de la masse implique que le produit \(\rho_i(t)\, \zeta_i(t)= \rho_0 \, \delta a\) est indépendant du temps. En considérant que les fluctuations sont petites, on peut écrire :
On établit alors que \(\dot \zeta_i = u_{i+{1\over 2}} - u_{i-{1\over 2}}\) où \(u_{i-{1\over 2}}\) et \(u_{i+{1\over 2}}\) sont les vitesses des frontières du tronçon de position \(a_i\). La loi de conservation de la masse s'écrit finalement :
Remarque : Conservation de la quantité de mouvement
Les pressions \(p_{i-{1\over 2}}\) et \(p_{i+{1\over 2}}\) aux frontières du tronçon de position \(a_i\) exercent des forces qui conduisent à l'écriture suivant du principe fondamental de la dynamique :
ou \(u_i\) est la vitesse du tronçon de position \(a_i\).
Méthode : Passage au continu
Dans la limite \(\delta a \to 0\), les lois de conservation de la masse et de la quantité de mouvement deviennent respectivement :
où l'on a utilisé la loi d'état linéarisée \(p-p_0 \sim c^2 \, {\rho - \rho_0\over S}\).
Texte légal : Équation des ondes sonores 1D
En combinant ces équations aux dérivées partielles, on obtient l'équation des ondes 1D \({\partial^2 \rho(a,t) \over \partial t^2}=c^2\, {\partial^2 \rho(a,t) \over \partial a^2} \). La vitesse du son vaut \(c=340\) m/s dans l'air et environ \(c=1500\) m/s dans l'eau.