
Kalman's Filter: II covariance diagnosis and evolution
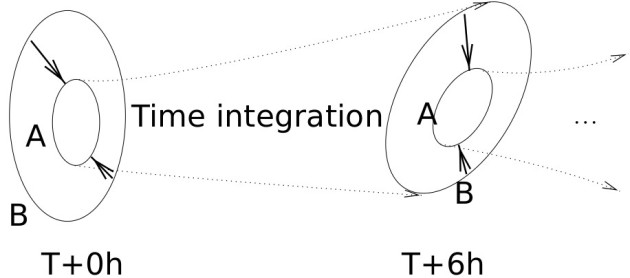
To simplify This dynamics of information one can keep in mind the following simple scheme that mimic pdf evolutions
At a given time
 , in the expression
, in the expression

where

we understand that since the
 matrix is at in first place, it is this matrix that spread into the background
matrix is at in first place, it is this matrix that spread into the background
 the correction comming from the innovation
the correction comming from the innovation
 .
.
Let see an example of such a
matrix and its consequences in terms of assimilation of observations.
First, we introduce a covariance matrix
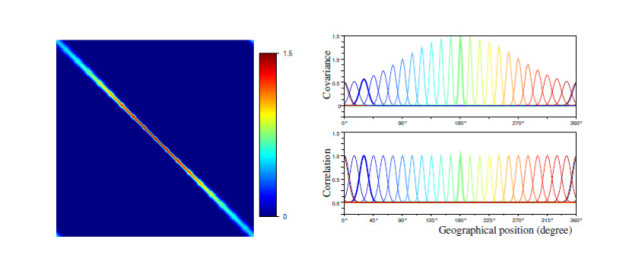
Some definition that help to feature a covariance matrix:
Definition :
The variance field is the diagonal of the
matrix.We denote by
 the diagonal matrix composed by the square root of the variance field. This is the standard-deviation field.
the diagonal matrix composed by the square root of the variance field. This is the standard-deviation field.The correlation functions that are the columns of the matrix
 .
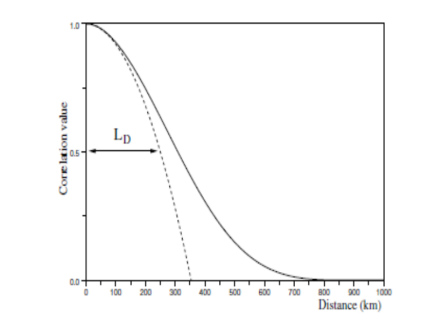
.The length-scale is the characteristic length that feature the degree of correlation between points.
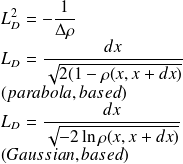
Length-scale definition
More precisely, one can defined the length-scale from the local correlation functions
 as follow [Dal91, PBD08]
as follow [Dal91, PBD08]
 |
(B\&B) |
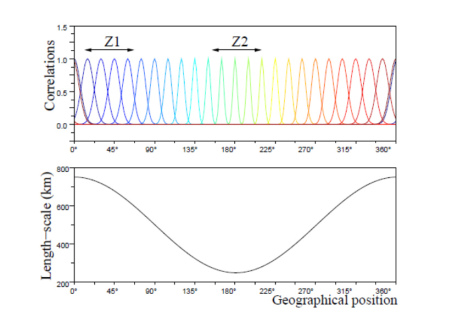
Example : Example of lenght-scale field for the 1D example:
What's happend when we assimilate the same pattern of observation at diffrent places?
Example : Example with Scilab (equivalent to Matlab but free) for the linear dynamic, on the circle,
so that
 the time space.
the time space.
// Dimension of phase space. n=200; // Geographical position. x=linspace(0,360,n); // Initialization for graphical rep. rect=[0 -1/2 360 1]; nax=[2 5 2 4]; // Definition of the model. c=zeros(n,1);c(2)=1; r=zeros(1,n);r($)=1; M=toeplitz(c,r); | 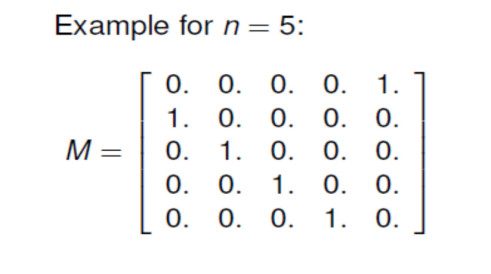 |
Time evolution of a signal.
// Initilization of the signal s=zeros(n,1); s(1:3)=[1/2 1 1/2]'; sn=s; // Loop of time evolution for t=1:100 // Time evolution snp=M*sn; // Graphical representation. clf; plot2d(x,snp,rect=rect,nax=nax); xpause(2000); // Updating of vectors. sn=snp; end |  |
Creation of a
matrix
// Initilization of a B matrix // Initialization of the length-scale dx=x(2);L=4*dx; // Gaussian correlation g=exp(-0.5*(x-x($/2)).^2/L**2)'; // Creation of B nmax=find(g==max(g)); c=[g(nmax:$) ; g(1:nmax-1)]; r=c'; B=toeplitz(c,r); // Graphical representation of some correlations. clf; xset("colormap",jetcolormap(128)); plot2d(x,B(:,1:10:$),rect=rect,nax=nax); | 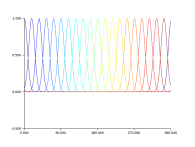 |
Definition :
Definition of the data network and the observational error covariance matrix R, and H the observational operator:
// Data network iobs=n/4:3:3*n/4; p=length(iobs); xobs=x(iobs); R=sigo**2*eye(p,p); plot2d(xobs,zeros(xobs)-0.25,rect=rect,nax=nax,style=-2); H=zeros(p,n); for i=1:p H(i,iobs(i))=1; end | 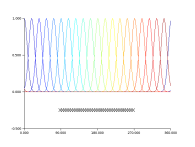 |
Example : Example of data assimilation and dynamics of information thanks to the Kalman's filter equations
Background - Analysis -Observations
// Example of covariance dynamics I=eye(B); xt=rand(n,1,'normal'); xb=xt+rand(xt,'normal'); for t=1:100 // -- Observation of xt (synthetic obs.) y=H*xt+rand( H*xt,'normal')*sigo; // -- Analysis step K=B*H'*inv(H*B*H'+R); xa=xb+K*(y-H*xb); A=(I-K*H)*B; // PLOT // -- Forecast step xb=M*xa; xt=M*xt; B=M*A*M'; // PLOT B + diag Lp. S=diag(sqrt(diag(B)));iS=inv(S);C=iS*B*iS'; rhop=sum(M.*C,'c'); Lp=1 ./ sqrt(2*(1-rhop)); end |  |
Example : Example of data assimilation and dynamics of information thanks to the Kalman's filter equations
Covariances of
at time q > 1.
// Example of covariance dynamics I=eye(B); xt=rand(n,1,'normal'); xb=xt+rand(xt,'normal'); for t=1:100 // -- Observation of xt (synthetic obs.) y=H*xt+rand( H*xt,'normal')*sigo; // -- Analysis step K=B*H'*inv(H*B*H'+R); xa=xb+K*(y-H*xb); A=(I-K*H)*B; // PLOT // -- Forecast step xb=M*xa; xt=M*xt; B=M*A*M'; // PLOT B + diag Lp. S=diag(sqrt(diag(B)));iS=inv(S);C=iS*B*iS'; rhop=sum(M.*C,'c'); Lp=1 ./ sqrt(2*(1-rhop)); end |  |
Example : Example of data assimilation and dynamics of information thanks to the Kalman's filter equations
length-scale of
at time q > 1.
// Example of covariance dynamics I=eye(B); xt=rand(n,1,'normal'); xb=xt+rand(xt,'normal'); for t=1:100 // -- Observation of xt (synthetic obs.) y=H*xt+rand( H*xt,'normal')*sigo; // -- Analysis step K=B*H'*inv(H*B*H'+R); xa=xb+K*(y-H*xb); A=(I-K*H)*B; // PLOT // -- Forecast step xb=M*xa; xt=M*xt; B=M*A*M'; // PLOT B + diag Lp. S=diag(sqrt(diag(B)));iS=inv(S);C=iS*B*iS'; rhop=sum(M.*C,'c'); Lp=1 ./ sqrt(2*(1-rhop)); end |  |




